歩行の評価とリハビリテーションでは、理学療法にはなじみがありますが、作業療法ではどう評価して良いかわからず、そのためリハビリもどのように展開していけば良いかがわからないということがあると思います。今回、歩行とリハビリテーションについて、歩行周期と筋活動からの評価の考え方についてまとめていきたいと思います。
目次
歩行とリハビリテーション!歩行周期と筋活動から評価を考える!
スポンサードサーチ
引用・参考文献
歩行の臨床バイオメカニクス 改訂版


スポンサードサーチ
歩行とエネルギー消費
歩行の力学モデル
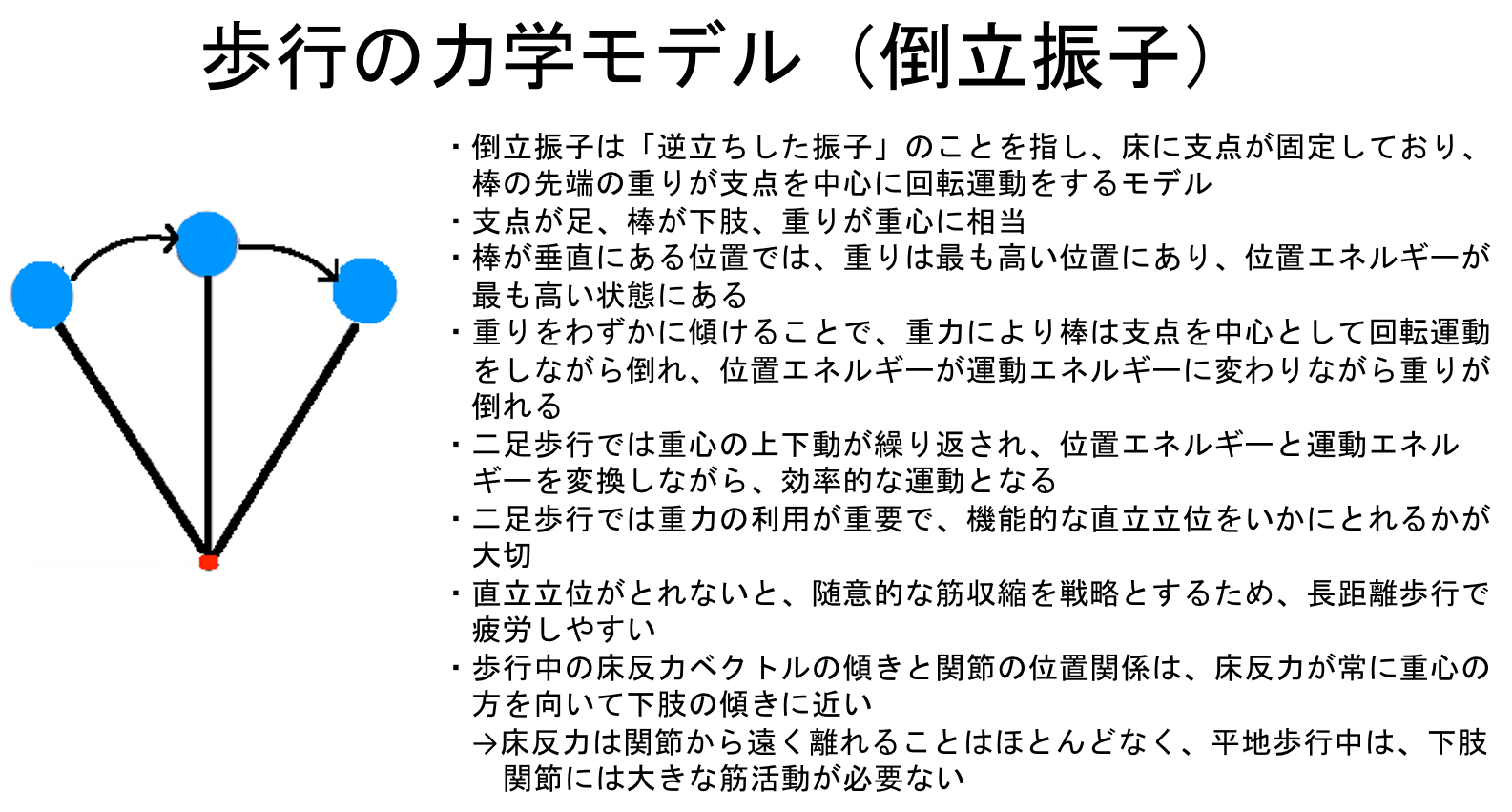
二足歩行を単純化した力学モデルで表すと、「倒立振子モデル」と考えることができます。
倒立振子は「逆立ちした振子」のことを指し、床に支点が固定しており、棒の先端の重りが支点を中心に回転運動をするモデルになります。
これは人の歩行で考えると、支点が足、棒が下肢、重りが重心に相当します。
倒立振子のエネルギーの動きについて、
重力環境下において、倒立振子の回転運動は位置エネルギーを運動エネルギーに変換することによって生じます。
歩行の臨床バイオメカニクス 改訂版 P3
とあり、棒が垂直にある位置では、重りは最も高い位置にあり、位置エネルギーが最も高い状態にあります。
ここから重りをわずかに傾けることで、重力により棒は支点を中心として回転運動をしながら倒れていき、位置エネルギーが運動エネルギーに変わりながら重りが倒れていきます。
二足歩行では左右の足を用いながら、重心の上下動が繰り返され、位置エネルギーと運動エネルギーを変換しながら、効率的な運動となっています。
このことから、二足歩行では重力を利用することが重要となり、そのためには機能的な直立立位をいかにとれるかということも重要になります。
機能的な直立立位がとれない場合、人は随意的な筋収縮を戦略として用いなければならず、長距離の歩行を行うと疲労しやすくなってしまいます。
歩行中の床反力と筋活動
歩行中の筋活動について、床反力ベクトルの傾きと関節の位置関係では、床反力が常に重心の方を向いて下肢の傾きに近いことがわかります。
そのため、床反力は関節から遠く離れることはほとんどなく、平地歩行中であれば、下肢の関節には大きな筋活動が必要でないことがわかります。
歩行と重心移動
歩行におけるエネルギー消費を考えた場合、同じ距離を進むには重心移動が少ない方が効率の良い動きとなります。
重心の上下の移動では、単脚支持で高く、両脚支持で低くなっており、上下の差は2〜3㎝となっています。
また、重心の左右の移動では、左右に動きながら前方移動しますが、左右の差も2〜3㎝となっています。
このことからも、歩行における重心移動の振幅は非常に小さいことがわかります。
歩行の重心移動と支持基底面
歩行中の重心は、歩行周期のうちのわずかな期間を除き、基底面の外にあります。
単脚支持期の基底面は接地している側の足底、両脚支持期では後足と前足を結ぶ狭い範囲である。
通常の歩行では踵から接地してつま先まで離地する。
したがって、両脚支持期であっても両足の足底をすべて接地した状態ではなく、後足はつま先のみ、前足は踵での接地となるため、実際の基底面はさらに狭くなる。
介助にいかすバイオメカニクス P90
このことから、歩行ではほとんどの時期において不安定な姿勢となっており、歩行が成立するには動き続けることが必要といえます。
スポンサードサーチ
歩行のバイオメカニクス!歩行と股関節周囲筋の作用!
立脚初期における股関節周囲筋の作用
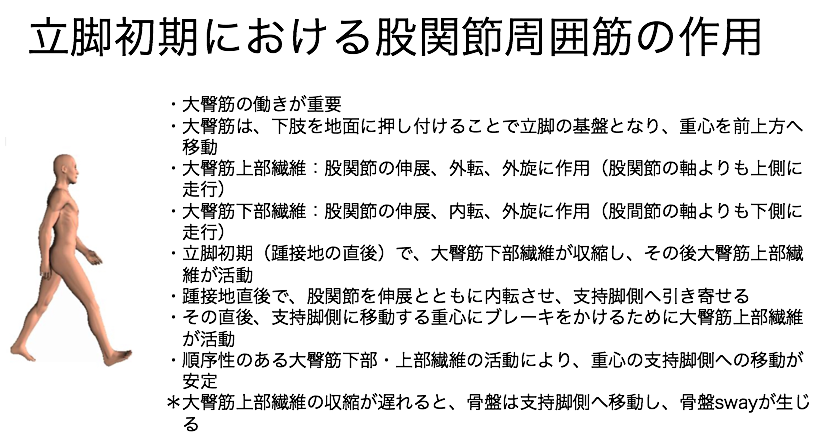
立脚初期において、股関節では大臀筋の働きが重要になります。
大臀筋は、下肢を地面に押し付けることで立脚の基盤となり、重心の前上方への移動をさせるのに必要になります。
大臀筋には上部・下部繊維がありますが、それぞれ股関節に対する作用に違いがあります。
大臀筋上部繊維では股関節の軸よりも上側に走行しており、股関節の伸展、外転、外旋に作用します。
一方、大臀筋下部繊維では股間節の軸よりも下側に走行しており、股関節の伸展、内転、外旋に作用します。
立脚初期の踵接地の直後では、大臀筋下部繊維が収縮し、その後大臀筋上部繊維が活動を始めます。
大臀筋下部繊維が作用する踵接地直後では、股関節を伸展とともに内転させ、支持脚側へ引き寄せる役割があります。
その直後、支持脚側に移動してくる重心にブレーキをかけるように大臀筋上部繊維の活動がみられます。
このような短い期間での順序性のある大臀筋下部・上部繊維の活動により、重心の支持脚側への移動が安定したものとなります。
この時、大臀筋上部繊維の収縮が遅れてしまうと、骨盤は支持脚側へ移動し、骨盤のswayが起こってしまいます。
大臀筋下部・上部繊維が順序良く活動する仕組みは、足部の動きとの関連が考えられています。
大臀筋下部・上部繊維が活動するタイミングと、踵骨外側突起、内側突起が接地するタイミングはよく一致しています(神経学的、運動学的にそのようなメカニズムになるかは明らかになっていません)。
荷重応答での膝関節の安定と股関節周囲筋の作用
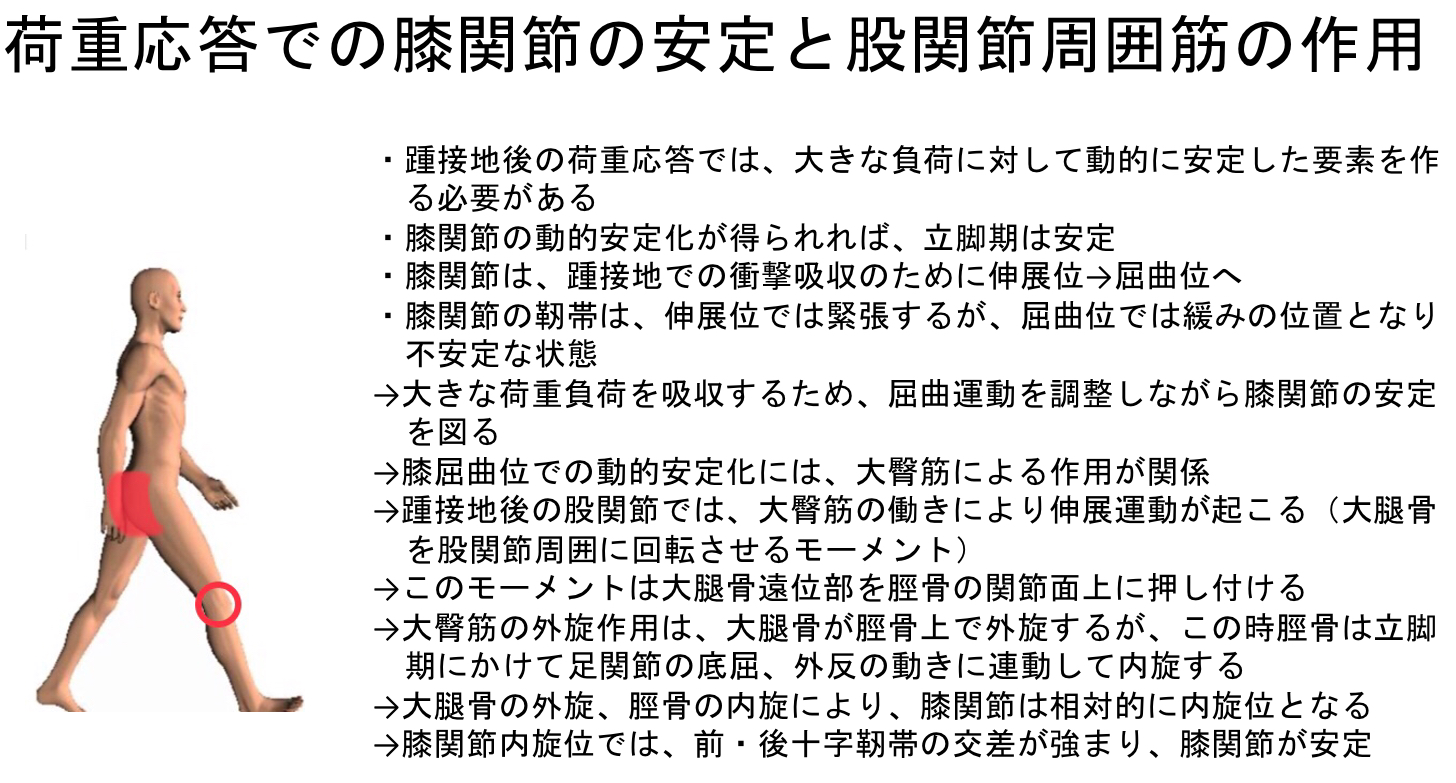
踵設置後の荷重応答では、大きくかかる負荷に対して動的に安定した要素を作っていく必要があります。
その際膝関節の動的安定化が得られれば、立脚期は安定したものとなります。
膝関節は、踵接地での衝撃吸収のために伸展位から屈曲位に変わります。
膝関節の靭帯は、伸展位では緊張していますが、屈曲位では緩みの位置となり不安定な状態になります。
そのため、踵接地後の膝関節では、大きな荷重負荷を吸収するために、屈曲運動を調整しながら膝関節の安定を図る必要があります。
膝屈曲位での動的安定化には、大臀筋による作用が関係してきます。
踵接地後の股関節では、大臀筋の働きにより伸展運動が起こりますが、この大腿骨を股関節周囲に回転させるモーメントは、大腿骨の遠位部を脛骨の関節面上に押し付ける作用があり、それが膝関節の動的安定化につながります。
他にも大臀筋の外旋作用では、大腿骨が脛骨上で外旋しますが、この時脛骨は立脚期にかけて足関節の底屈、外反の動きに連動して内旋します。
この大腿骨の外旋、脛骨の内旋により、膝関節は相対的に内旋位となります。
膝関節内旋位では、前十字靭帯と後十字靭帯の交差が強まり、関節面において接合力が上がり膝関節の安定化が図られます。
重心移動と股関節
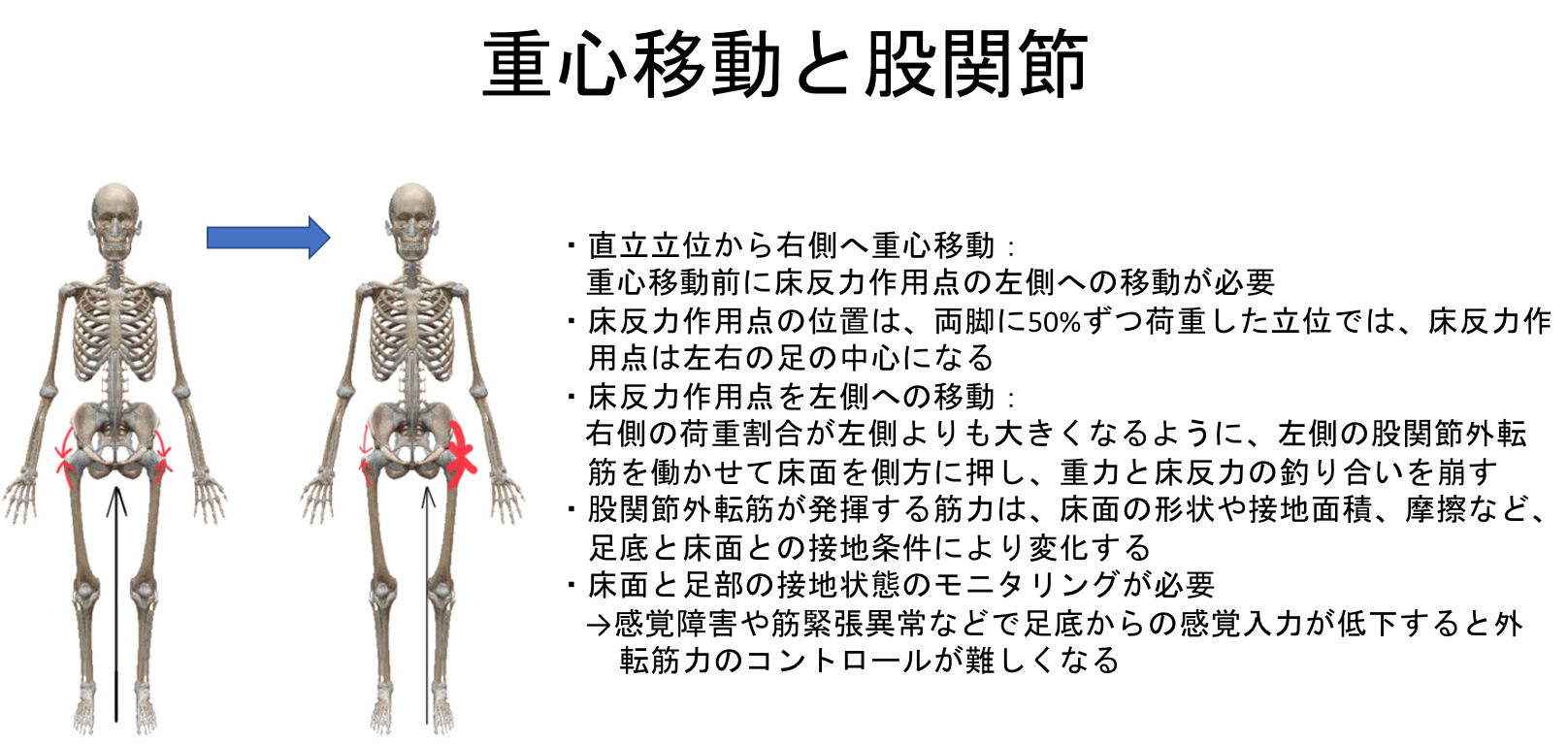
直立立位から右側へ重心を移動する場合、右側へ重心移動するためには重心移動の前に床反力作用点(左右の各足に作用する右足の床反力と左足の床反力を足し合わせた、身体全体に作用する合成床反力)を左側へ移動することが必要となります。
床反力作用点の位置は、身体と床面が接触している範囲における圧力の分布度合いによって決定します。
両脚に50%ずつ荷重した立位では、床反力作用点は左右の足のちょうど真ん中になります。
床反力作用点を左側に移動するためには、右側の荷重割合が左側よりも大きくなるように、左側の股関節外転筋を働かせて床面を側方に押し、重力と床反力の釣り合いを崩します。
このとき、股関節外転筋が発揮する筋力に関しては、床面の形状や接地面積、摩擦など、足底と床面との接地条件により変化します。
そのためには床面と足部の接地状態を常にモニタリングする必要がありますが、感覚障害や筋緊張異常などにより足底からの感覚入力が低下している場合、外転筋力のコントロールが難しくなります。
重心制御と股関節の両側性活動
重心に生じる加速度の大きさは、床反力作用点と重心線との距離によって決まり、床反力作用点が重心線から離れるほど、重心に生じる加速度は大きくなります。
一方の脚を右側へ大きくステップする場合、左脚(重心を加速させる方向と逆方向の脚)が地面を押し、床反力作用点を移動することで重心に加速度が生じ、重心移動が起こります。
すると、転倒しないようにもう一方の脚では、重心の移動してくる方向に脚を踏み出し、新たな支持面を作っていく必要があります。
このとき、加速している重心制御のためには、重心の加速度と逆向きで同じ大きさの加速度が必要になります。
このことから重心の制御には、両側の股関節の協調的な活動が必要になります。
脚が床面を押して床反力作用点を移動し重心を加速させることに対して、もう一方の脚で重心線を挟んで両脚が対角線上で等距離の感覚で配置されていることが重心のコントロールでは大切になってきます。
歩行での股関節の両側性活動
前途した股関節の両側性活動では、静止状態から一歩踏み出すような場合には、重心制御が行えますが、歩行のように、すでに重心に加速度がある運動ではそれだけでの重心制御は不十分となります。
歩行と重心の制御について、
すでに重心が加速度を持っているような場合には、力によって重心の位置が直接決まるわけではなく、決まるのは加速度ですから、この加速度がそのときの速度に追加され、新しい速度が決まり、この速度の集積効果重心の位置がようやく決まってきます。
したがって、単純に股関節が対極的に相反する方向へ動いて支持面を作っただけでは、重心の動く方向と新しい支持面の位置がずれてしまいます。
そのずれによって、重心は別の方向に加速度を持ってしまうので、その加速度を打ち消すために、さらにもう一歩脚を出さなくてはなりません。
歩行の臨床バイオメカニクス P45
とあります。
なお、歩行中に急停止する場合には、最低でも二歩脚を出して止まる必要があります。
歩行中の体幹の安定性と股関節
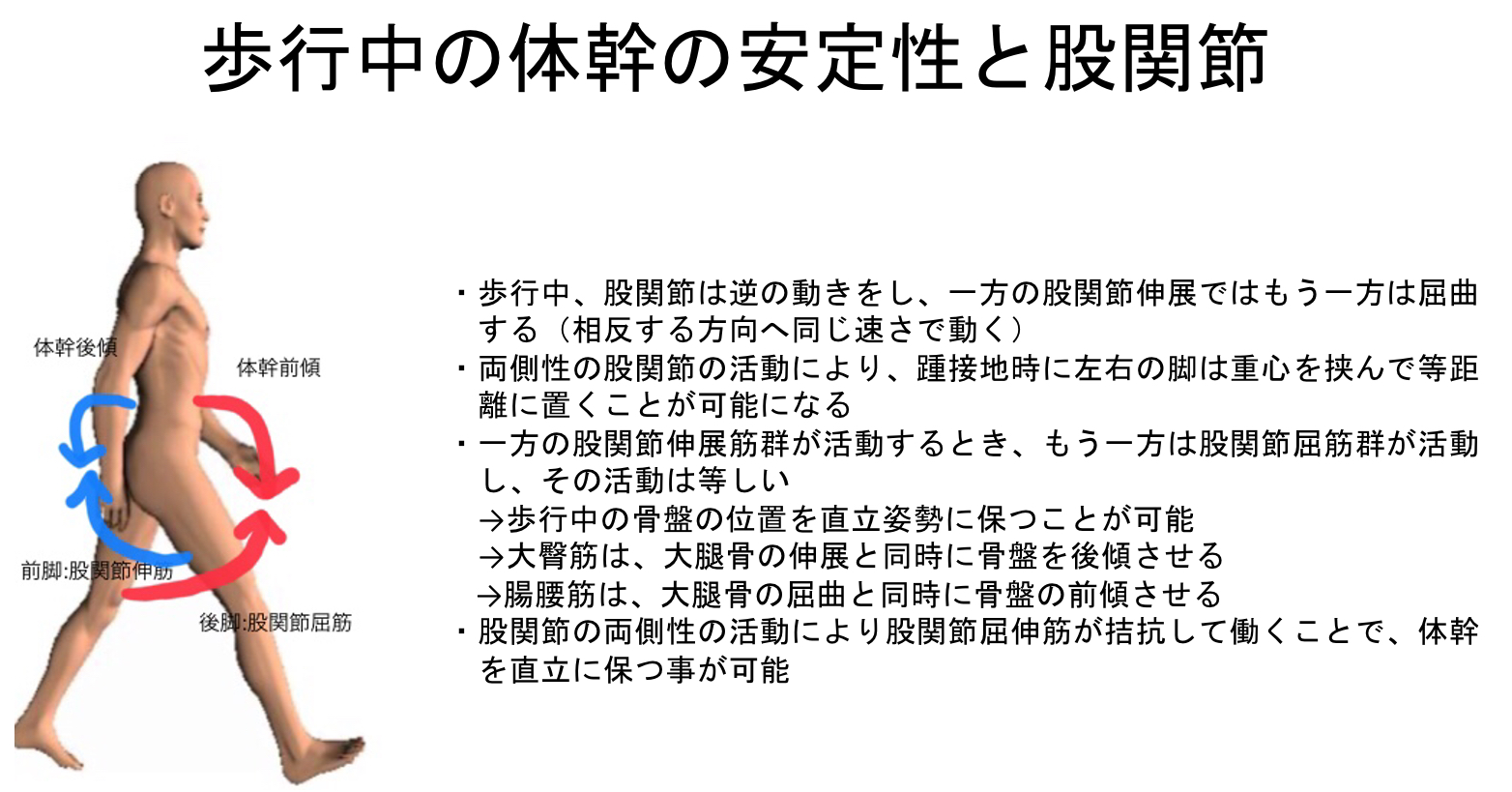
歩行中、股関節は逆の動きをしており、一方の股関節が伸展している場合には、もう一方は屈曲しており、相反する方向へ同じ速さで動きます。
このような両側性の股関節の活動により、踵接地時に左右の脚は重心を挟んで等距離に置くことが可能になります。
一方の股関節伸展筋群が活動するときには、もう一方は股関節屈筋群が活動しており、その活動は等しいものとなります。
この働きにより、歩行中の骨盤の位置を直立姿勢に保つことが可能となります。
股関節伸展筋の大臀筋では、大腿骨の伸展と同時に骨盤を後傾させ、股関節屈筋の腸腰筋では、大腿骨の屈曲と同時に骨盤の前傾させます。
このことから、股関節の両側性の活動によって股関節屈伸筋が拮抗するように働くことで、体幹を直立な状態に保つことができています。
遊脚期と股関節
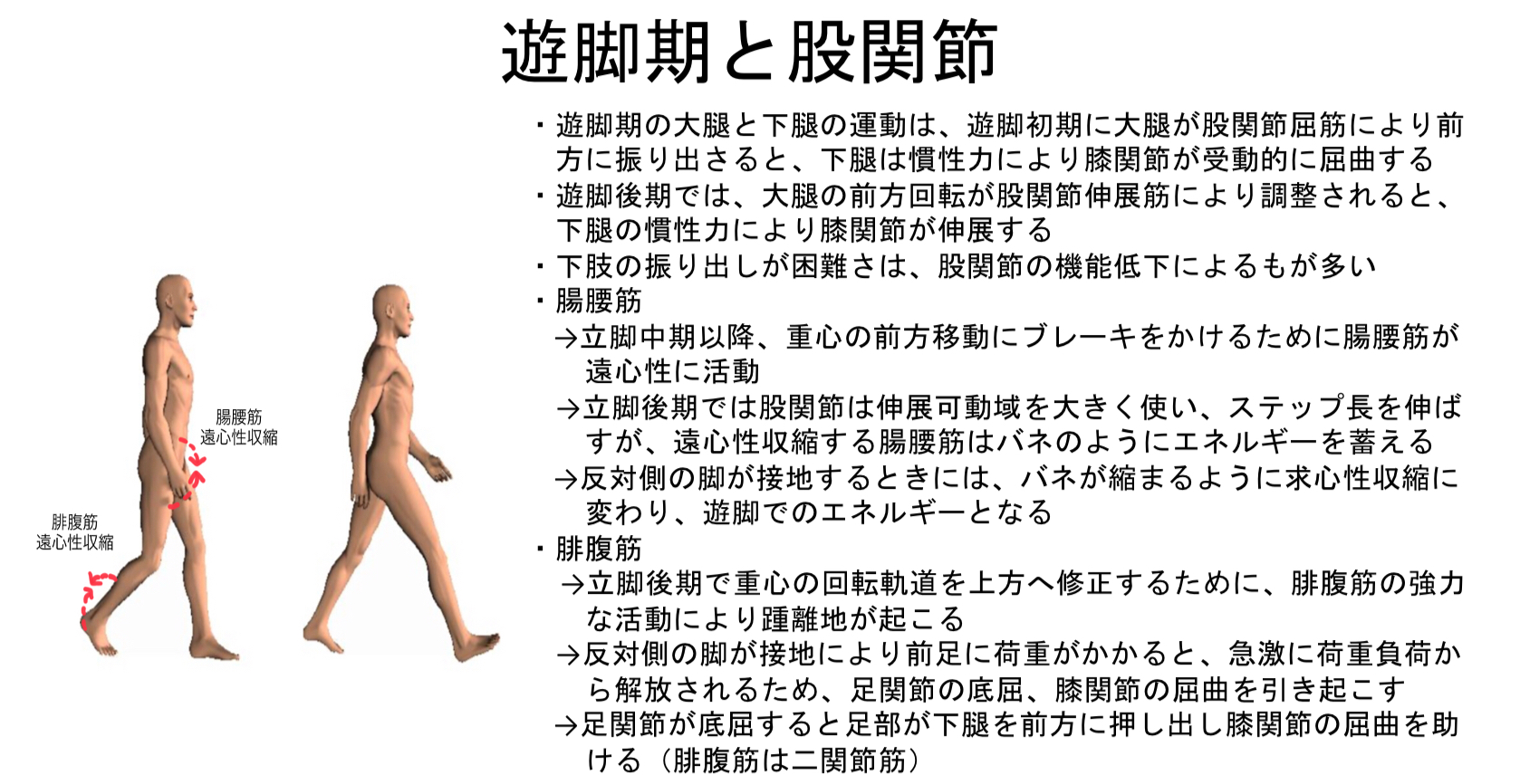
遊脚期の大腿と下腿の運動は、遊脚初期に大腿が股関節屈筋により前方に振り出さると、下腿は慣性力により膝関節が受動的に屈曲します。
遊脚後期では、大腿の前方回転が股関節伸展筋により調整されると、下腿の慣性力により膝関節が伸展します。
このように、膝関節の運動は股関節の動きから誘発されます。
このことから、股関節機能が十分に働くことができれば、膝関節の運動は受動的に起こるため、複雑な制御をする必要はありません。
多くの患者は遊脚期での下肢の振り出しが困難と感じていますが、これは股関節の機能低下によるものと考えることができます。
遊脚期における股関節の機能は、腸腰筋が重要になります。
立脚中期以降、重心の前方移動にブレーキをかけるために腸腰筋が遠心性に活動します。
立脚後期では股関節は伸展可動域を大きく使い、ステップ長を伸ばしますが、このとき遠心性収縮をしている腸腰筋は伸びたバネのようにエネルギーを蓄えます。
反対側の脚が接地するときには、バネが縮まるように求心性収縮に変わり、遊脚でのエネルギーとなります。
このようなことは腓腹筋でも起こっています。立脚後期で重心の回転軌道を上方へ修正するために、腓腹筋の強力な活動により踵離地が起こります。
この腓腹筋の活動は、反対側の脚が接地により前足に荷重がかかると、急激に荷重負荷から解放されるため、足関節の底屈、膝関節の屈曲を引き起こします。
足関節が底屈すると足部が下腿を前方に押し出し膝関節の屈曲を助けます。また腓腹筋は二関節筋のため、膝関節を屈曲させ遊脚の補助を行います。
これらのことから、遊脚期での下肢の振り出しは、立脚中期以降から開始されており、その相での股関節伸展や踵離地が不十分であると、遊脚は随意的な下肢の引き上げによってなされることとなり、歩行の自律性が失われてしまいます。
股関節については以下の記事も参照してください。
- 股関節と膝関節!膝関節内反と股関節外側の疼痛の関係性!
- 股関節の動的安定性に関与する小殿筋の概要と評価、リハビリ方法!
- 股関節の動的安定性に関与する腸腰筋の概要と評価、リハビリ方法!
- 股関節と痛み、バランスや歩行との関係性!殿筋に対する評価とアプローチ方法!
- 股関節の動的安定性に関与する深層外旋6筋の概要と評価、リハビリ方法!
- 膝立ちは姿勢矯正や股関節・体幹の筋力強化、バランス改善に効果的!
- 脳卒中片麻痺の下肢(股関節)のリハビリ・自主トレ!歩行獲得に向けて!
スポンサードサーチ
歩行のバイオメカニクス!Heel Rockerの役割!
Heel Rockerと衝撃吸収

歩行周期の中で、最も重心の位置が高くなるのが立脚中期です。
踵接地時に重心が最も高い位置から最も低い位置に移動しますが、その高低差は約2〜3㎝となります。
この際の衝撃を吸収する役割をHeel Rockerが担っています。
立脚初期のHeel rockerの時期では、体重の1.2〜1.5倍の荷重がかかると言われており、衝撃吸収がなされない場合、骨、関節、内臓などにはかなりの衝撃が加わることになります。
またこの時、足関節背屈筋群の遠心性収縮とほぼ同時期に、膝関節伸展筋群の遠心性収縮が行われています。
踵接地の際には膝関節は伸展約0度となります。なお、その際膝関節10度屈曲すると外側側副靭帯(ACL)が緩むため、5度の屈曲が限度となります。
踵接地後に遠心性収縮をしていた前脛骨筋は、同時に脛骨(下腿)を前方回転させ、膝関節を屈曲させます。
この際、大腿四頭筋の遠心性収縮により膝の屈曲にブレーキをかけ、膝関節の屈曲を約15度まで許します。
なお、このような遠心性収縮が得られない場合、膝は過伸展してしまいます。
他にも股関節では、踵接地時に骨盤が約4度遊脚側へ側方傾斜しますが、これは立脚側の股関節外転筋の遠心性収縮によりコントロールされ、衝撃吸収としての役割を持ちます。
踵接地以前の衝撃吸収
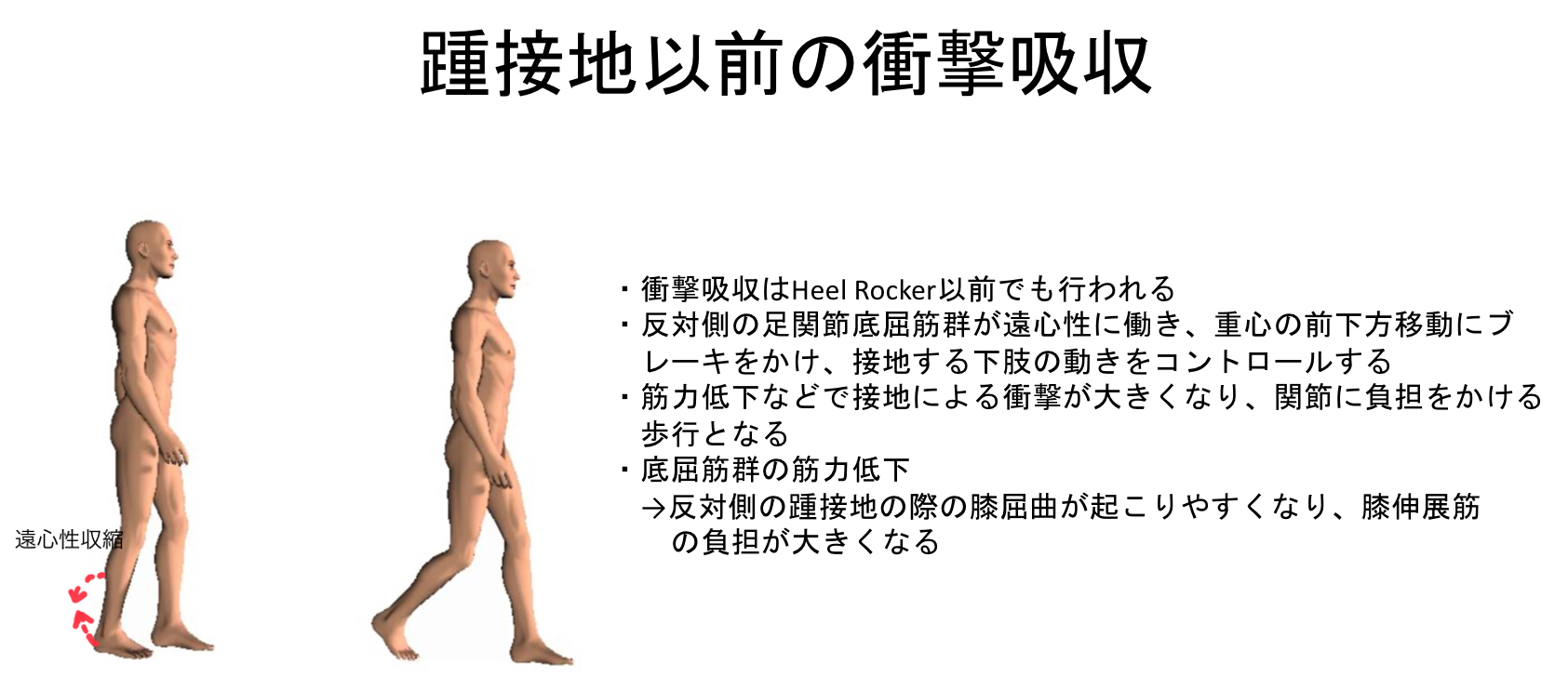
衝撃吸収はHeel Rocker以前でも行われています。
反対側の足関節底屈筋群が遠心性に働くことによって、重心の前下方移動にブレーキをかけ、接地する下肢の動きをコントロールしている。
介助にいかすバイオメカニクス P100
踵接地側のHeel Rockerと反対側の下肢の働きによって、巧みな衝撃吸収のメカニズムが働いていることがわかります。
筋力低下などで筋機能が低下した場合には、接地による衝撃が大きくなり、関節に負担をかける歩行となってしまいます。
底屈筋群の筋力低下がみられる場合、反対側の踵接地の際の膝屈曲が起こりやすくなり、膝伸展筋の負担が大きくなることがあります。
Heel Rockerの筋活動
Heel Rockerの筋活動について、
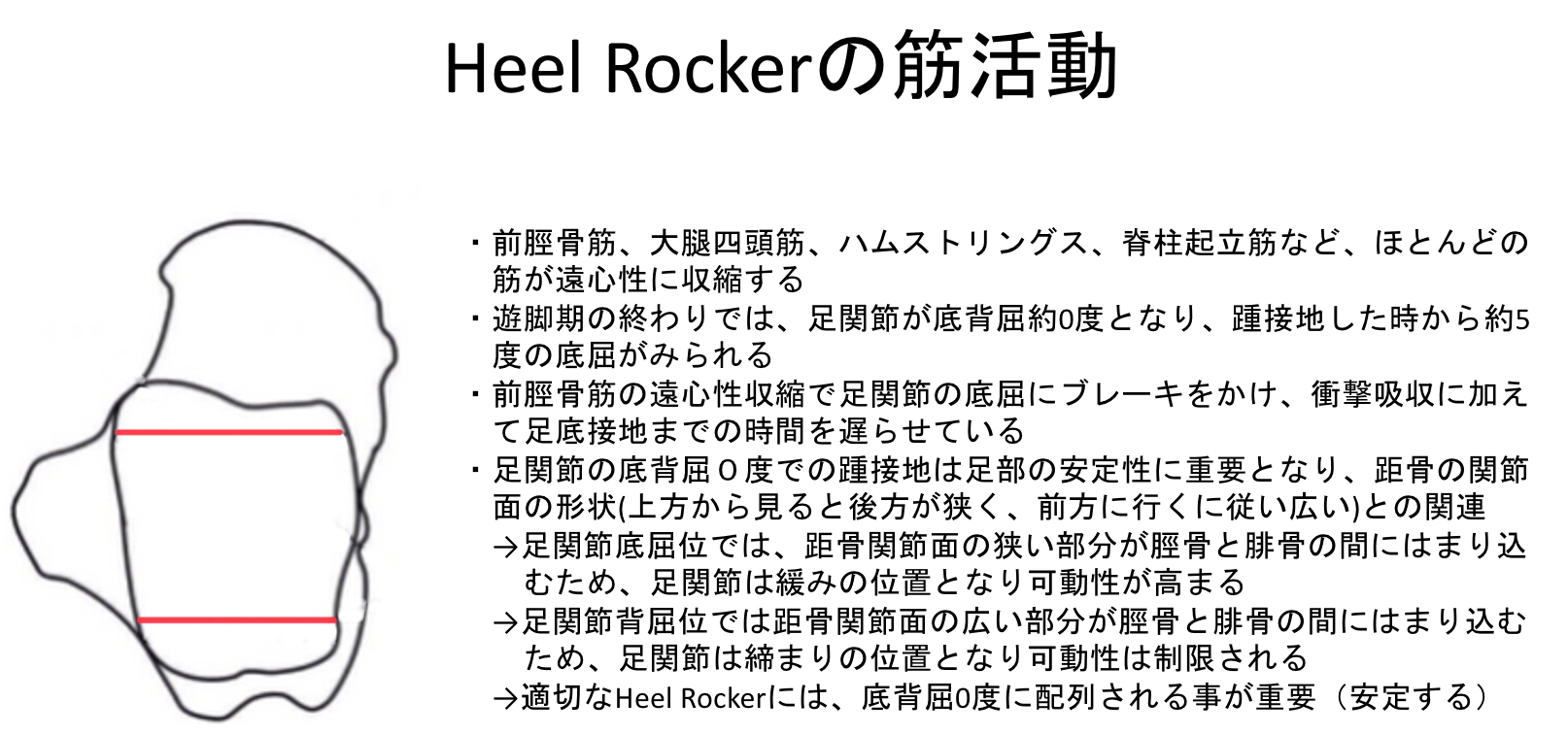
前脛骨筋、大腿四頭筋、ハムストリングス、脊柱起立筋など、活動するほとんどの筋が遠心性に収縮して衝撃の吸収に動員されます。
歩行の臨床バイオメカニクス P7
とあり、衝撃吸収があるからこそ体重の1.2〜1.5倍の荷重で抑えられていることがわかります。
遊脚期の終わりでは、足関節が底背屈約0度となり、踵接地した時から約5度の底屈がみられます。
この時には前脛骨筋の遠心性収縮により足関節の底屈にブレーキをかけることで、衝撃吸収に加えて足底接地までの時間を遅らせています。
足関節の底背屈0度で踵接地することは、足部の安定性に重要となり、それは距骨の関節面の形状との関連によるものです。
距骨の関節面は上方から見ると、後方が狭く、前方に行くに従い広くなっています。
そのため足関節が底屈位にある時には、距骨関節面の狭い部分が脛骨と腓骨の間にはまり込むため、足関節は緩みの位置となり可動性が高まります。
一方、足関節背屈位では距骨関節面の広い部分が脛骨と腓骨の間にはまり込むため、足関節は締まりの位置となって、足関節の可動性は制限されます。
歩行の臨床バイオメカニクス P24
このことから、踵接地において適切なHeel Rockerを形成するためには、足関節が安定する、最も適合性の高い底背屈0度に配列される必要があります。
足関節背屈0度に配列できない原因
評価方法:Heel Rocker時下肢の肢位である、股関節屈曲約30度、膝関節伸展0度での足関節背屈角度を確認します。
原因①
腓腹筋とハムストリングスの筋膜の連結(superficial back line:足底筋膜ー下腿三頭筋ーハムストリングスー仙腸靭帯ー胸腰筋膜)による筋緊張の相互作用。
ハムストリングスが高緊張だと、腓腹筋や足底筋膜の緊張も高くなります。そのため、足関節の背屈制限が起こる可能性があります。
原因②
腓腹筋の緊張と、足底筋膜の緊張の合力により、踵骨と距骨が前方に押し出されます。
そのため足関節背屈時に距骨が脛骨と腓骨の間に滑り込む動きが制限され、距骨のインピンジメントが起こり、背屈制限が起こります。
原因③
後脛骨筋の緊張も足関節の背屈制限を引き起こすことがあります。
これは後脛骨筋の底屈によるもとというよりも、脛腓関節の可動性を低下させることによるものと考えられます。
足関節の背屈時には、距骨の広い関節面(前側)が脛骨と腓骨の間に滑り込みますが、後脛骨筋の高緊張により腓骨の運動(挙上、外旋、外開)が制限されると、距骨の広い関節面を受け入れるスペースが作れないため、足関節の背屈は制限を受けやすくなります。
Heel Rockerと踵骨接地位置の関係
正常歩行でのHeel Rockerでは、 踵骨の外側突起から接地し、その直後に踵骨内側突起の接地となります。
踵骨外側突起での接地時の床反力は、踵骨のわずかな回内方向への傾斜を起こします。
この時、後距踵関節面に圧縮力が働き、それにより距骨と踵骨は関節面における骨性の安定性を得ることが可能となります。
内側距踵関節面では、踵骨上にある距骨のわずかな活動性を許します。
この動きは、路面環境に合わせて距骨の下で踵骨の動きを可能にし、路面の傾斜具合によって脛骨の傾斜を防ぐ働きがあります。
以上のような、骨性の安定性が得られない場合、踵骨は靭帯や筋により安定性を確保しなければならず、不安定な踵接地となったり、過剰な筋活動で固定された足部での踵接地となり、様々な路面状況に合わせた歩行が難しくなります。
Heel Rockerと足のアーチ構造
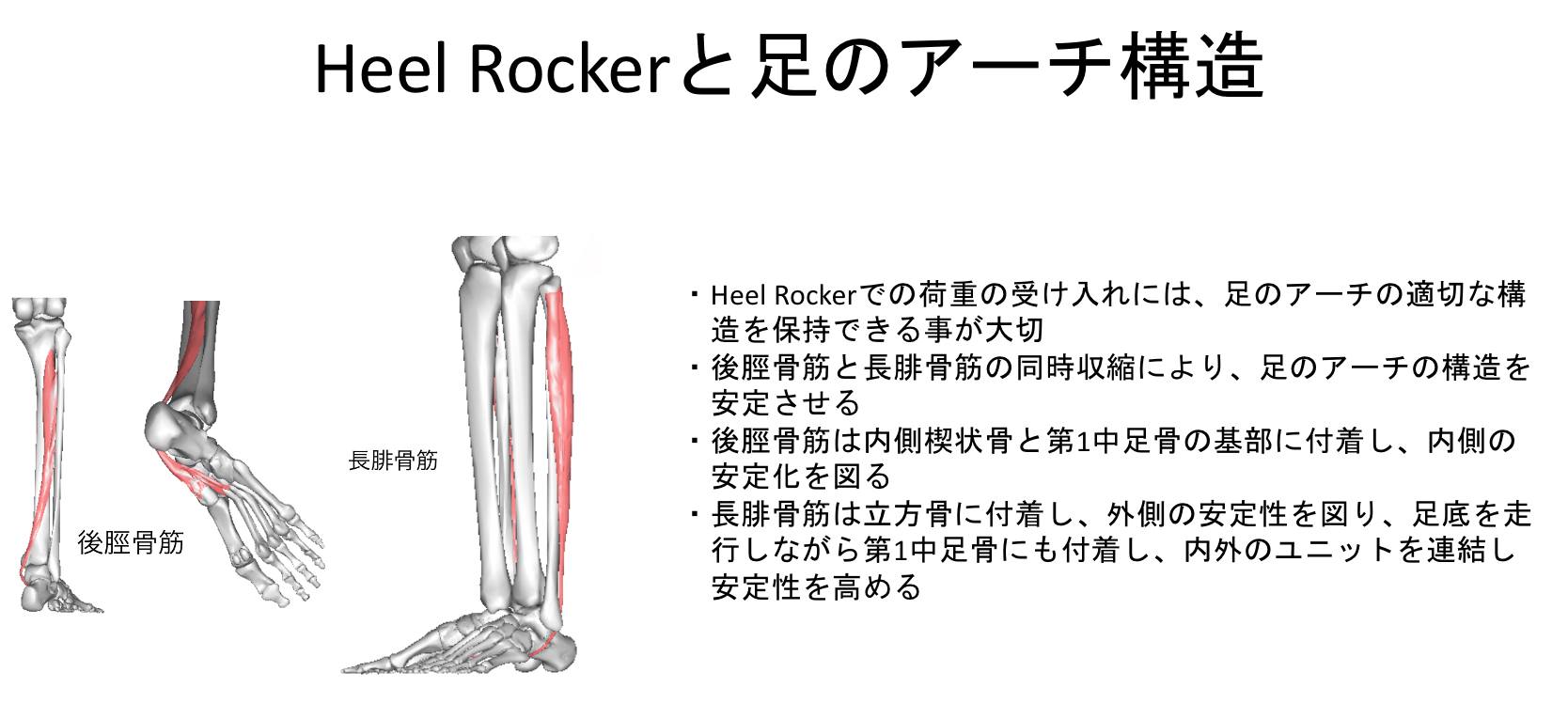
Heel Rockerでの荷重の受け入れには、足のアーチの適切な構造を保持しておくことが重要になります。
これには後脛骨筋と長腓骨筋の同時収縮により、足のアーチの構造を安定させる必要があります。
後脛骨筋は、内側楔状骨と第1中足骨の基部に付着し、内側の安定化を図ります。
長腓骨筋は立方骨に付着し、外側の安定性を図り、足底を走行しながら第1中足骨にも付着し、内外のユニットを連結し安定性を高めています。
Heel Rockerと前方への回転
Heel Rockerによる衝撃吸収メカニズムでは、活動するほとんどの筋が遠心性収縮を行っていると述べました。
しかし、遠心性収縮ばかりでは体を前方に回転することはできず、接地するたびに重心が一度停止し、また前方に回転していくようなスムーズさに欠けた効率の悪い動きとなってしまいます。
そのため前方への回転運動を作り出すために、踵の形状を利用して、前方への回転を行っていきます。
脳卒中片麻痺者では踵接地が困難な場合が多いですが、それではHeel Rockerが十分に働かず重心が一度とまってしまい、前方に回転するために随意的に動いていく必要があります。
これでは効率が悪く、疲れやすい歩行となってしまいます。
前脛骨筋の遠心性収縮による膝屈曲と着座動作との関係
着座動作での筋活動は、全て伸筋の遠心性収縮によるものです。
着座動作では、先に股関節を屈曲してしまうと、膝関節の屈曲が得られにくくなります。
そこで、膝関節屈曲を起こすために、前脛骨筋の遠心性収縮により脛骨を前に倒し、大腿四頭筋の遠心性収縮も加わりブレーキをかけながら膝を屈曲させていきます。
これは、立脚初期のHeel Rockerの衝撃吸収のメカニズムと同じような筋活動となります。
そのため、着座動作が上手くいかない場合は、立脚初期が上手く行えていない可能性があります。
なお、着座動作において伸筋の遠心性収縮を促す場合には、上肢に持ったターゲットをリーチングにより机上に置き直すような形をとり、体幹と下腿が平行な位置関係をとりながら着座していくと促しやすくなります。
スポンサードサーチ
歩行のバイオメカニクス!Ankle Rockerの役割!
Ankle Rockerの前半と後半の役割の違い
Ankle Rockerの前半部分では、立脚中期での機能的直立位(骨盤のアライメント、膝伸展、股関節の直上への重心配列)のために、重心を最高到達点に持ち上げながら、前方へ回転させることが主な役割になります。
Ankle Rockerの後半部分では、機能的直立位により最高到達点に達した重心が、前下方に落下しながら加速することに対してブレーキをかけ、速度調節をする役割があります。
立脚中期から後期にかけて、床反力のベクトルは足関節の前を通り、足関節は背屈していくため、下腿が前方に倒れるのを防止するため、ヒラメ筋の遠心性収縮により前方回転にブレーキをかけ、回転速度を調節します。
この働きにより、一定の速度で歩くことが可能になります。
重心の最高点・最低点と推進力
歩行中の重心位置を矢状面から見た場合、約2㎝の振幅で上下に移動しています。
この流れの中で、重心が最高到達点になるのは単脚支持期(立脚中期)で、最低点になるのは両脚支持期となります。
立脚初期の踵接地で最低到達点となる重心は、立脚中期に最高到達点へ持ち上げられることになります。
最高到達点まで持ち上げられた重心は、Heel Rockerでの身体の回転運動により、下降しながら前方への推進力となっていきます。
このような、位置エネルギーを運動エネルギーに変換しながら歩行を行うことは、とても効率のよい動きであるといえます。
重心上昇のメカニズム
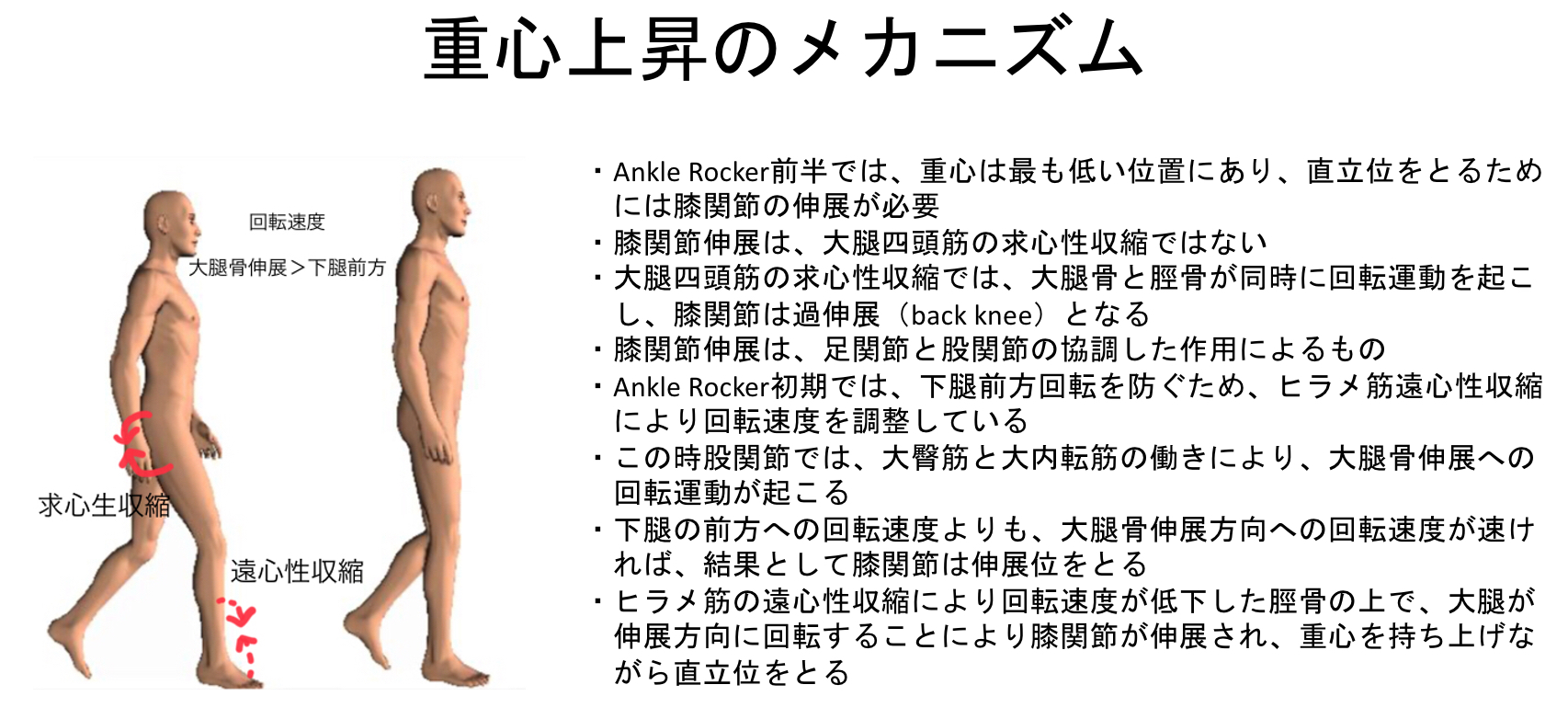
前途したように、重心を利用した推進力を生み出すためには、重心を上方に持ち上げ、機能的直立位を実現する必要があります。
Ankle Rockerの前半部分では、Heel Rockerでの衝撃吸収のために膝関節が屈曲した状態にあり、重心は最も低い位置にあります。
この位置から重心の上昇し、機能的直立位をとるためには、膝関節の伸展が必要になります。
この時、膝関節を伸展させるのは、大腿四頭筋の求心性収縮ではありません。大腿四頭筋の求心性収縮が起こると、大腿骨と脛骨が同時に回転運動を起こしてしまうため、膝関節は過伸展(back knee)となり、立脚中期での機能的直立位をとることができなくなります。
膝関節伸展の本当のメカニズムは、足関節と股関節の協調した作用によりもたらされています。
Ankle Rockerの初期では、下腿(脛骨)が前方回転しすぎるのを防ぐために、ヒラメ筋の遠心性収縮によりブレーキをかけることで回転速度を調整しています。
この時股関節では、大臀筋と大内転筋の働きにより、大腿骨伸展への回転運動が起こります。
この時に、下腿の前方への回転速度よりも、大腿骨伸展方向への回転速度が速ければ、結果として膝関節は伸展位をとることになります。
わかりやすい例として、
立位で一側の下肢を一歩前に出して、膝を曲げた状態を想像してください。
この時、一歩前に出した側の脛骨が後ろから紐で固定されていたとします。その体勢から股関節を伸展させて歩こうとすると、膝が伸びて過伸展してしまいます。
それと原理は同じです。
歩行の臨床バイオメカニクス P11
このことからも、ヒラメ筋の遠心性収縮により回転速度が低下した脛骨の上で、大腿が伸展方向に回転することにより膝関節が伸展され、重心を持ち上げながら機能的直立位をとることになります。
重要なことは、大腿四頭筋の求心性収縮ではなく、足関節と股関節の協調的な運動により膝伸展が起こるということです。
立脚中期以降のブレーキ作用
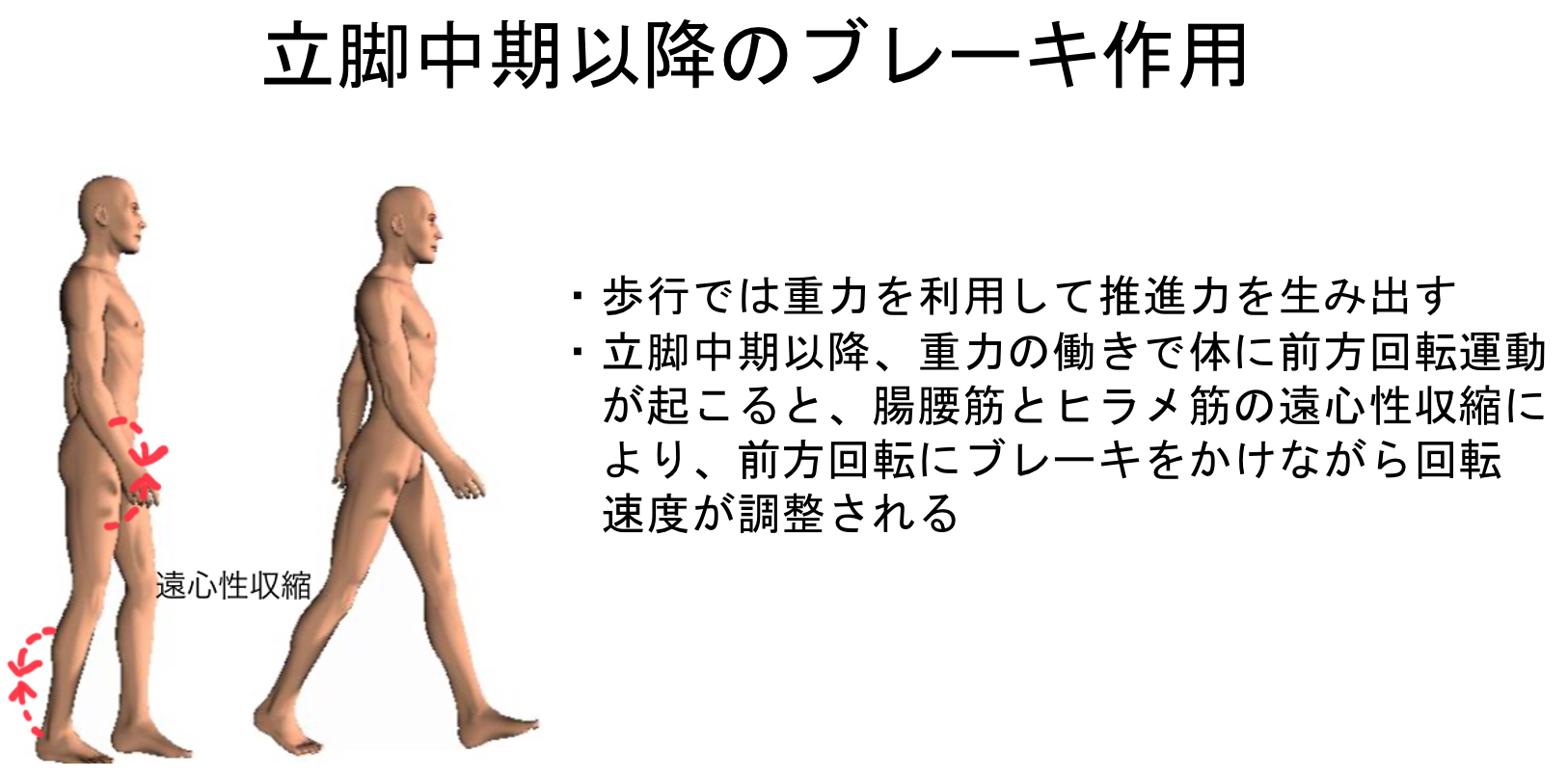
歩行では重力を利用して推進力を生み出しています。
立脚中期以降、重力の働きで体に前方回転運動が起こると、腸腰筋とヒラメ筋の遠心性収縮により、前方回転にブレーキをかけながら、回転速度が調整されます。
Ankle Rockerと足関節軸
踵接地時には、第2中足骨はわずかに外側を向いており、踵接地した直後に第2中足骨は進行方向に向き合うように配列されます。
この過程は、Heel RockerからAnkle Rockerへと移行するための大切なメカニズムとなります。
Ankle Rockerでは、重心を進行方向へ回転させますが、そのためには足関節の軸が進行方向に対して直角に交わるように配列される必要があります。
これは、Ankle Rockerでは足先が向いた方向にのみ重心を回転できないということになります。
進行方向に第2中足骨が配列されいていない場合、進もうとする方向と実際の回転における軸がずれることになり、スムーズな体の回転が困難になります。
Ankle Rockerがスムーズに行われるためには、Heel Rockerでの踵骨の外側突起からの接地が重要になります。
踵骨外側突起が接地した直後に踵骨内側突起が接地しますが、この際足部が回外位から回内しながら底屈していきます。
運動連鎖により、足部の回内は下腿回旋を引き起こし、これにより外側を向いていた第2中足骨は進行方向に配列されます。
このような踵骨内側突起での接地が起こらず、全足底接地となった場合、下腿内旋がおこらず第2中足骨は外側を向いたままでの足底接地となり、Ankle Rockerは重心の進行方向に正しく配列されず、スムーズな体の回転が妨げられてしまいます。
スポンサードサーチ
歩行のバイオメカニクス!Forefoot Rockerの役割!
Forefoot Rockerでの回転軸の移動とステップ長のコントロール
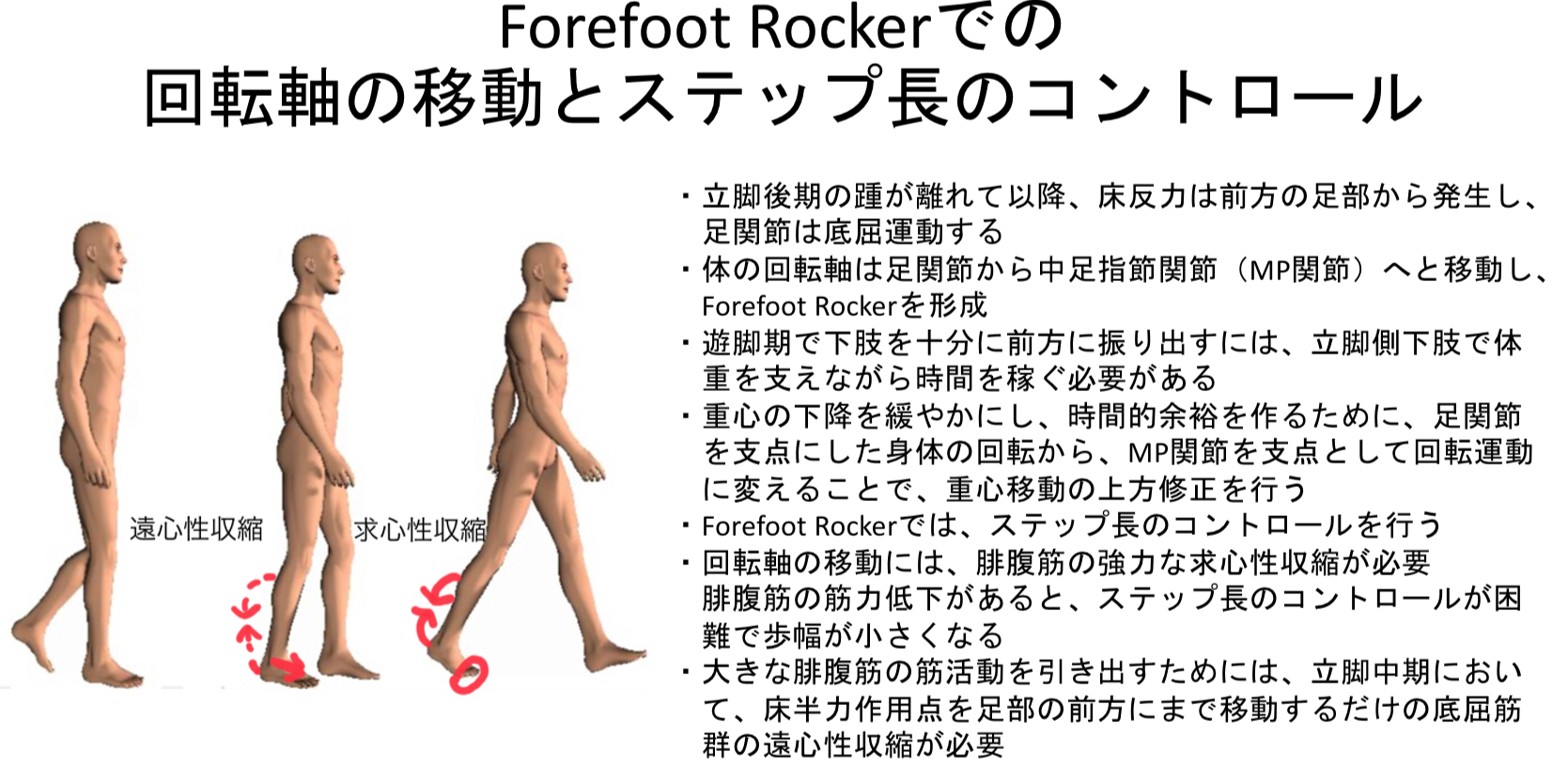
立脚後期の踵が離れて以降、床反力は前方の足部から発生し、足関節は底屈運動をしていきます。
この際、体の回転軸は足関節から中足指節関節(MP関節)へと移動し、Forefoot Rockerを形成します。
回転軸が移動することには、重心軌道の上方修正を行う点において大きな意味を持ちます。
立脚中期で重心は最高到達点となり、立脚後期では前下方に移動していきます。
この時、反対側の下肢では遊脚期となり、下肢を前方に振り出しています。
遊脚期で下肢を十分に前方に振り出すためには、立脚側の下肢で体重を支えながら時間を稼ぐ必要があります。
この時、立脚側の足関節を支点とした円軌道では体の前方回転とともに重心位置が下降していくため、遊脚側の下肢を十分に振りだす時間的余裕が稼げなくなります。
そこで重心の下降を緩やかにし、時間的余裕を作るために、足関節を支点にした身体の回転から、MP関節を支点として回転運動に変えることで、重心移動の上方修正を行っているのです。
このことからForefoot Rockerでは、ステップ長のコントロールを行っていることになります。
回転軸の移動には、腓腹筋の強力な求心性収縮が必要となり、腓腹筋の筋力低下があると、ステップ長のコントロールが困難になります。
そのため、結果として歩幅が小さくなってしまいます。
また、このときの大きな腓腹筋の筋活動を引き出すためには、それ以前の立脚中期において、床半力作用点を足部の前方にまで移動するだけの底屈筋群の遠心性収縮が必要になります。
Forefoot Rockerと遊脚肢のアライメント
Forefoot Rockerの働きにより立脚側での十分な滞空時間を稼ぎ、遊脚肢が接地のための準備を行う時間を作ることが可能になります。
正常な歩行では、遊脚肢は接地のために適切な配置のアライメントを作ってから接地するようにしなければなりません。
このときの適切なアライメントとは、膝関節が完全伸展位となること、足関節底背屈0度となることです。
このアライメントが保たれていると、膝関節はロッキングにより構築学的に安定したものとなります。
そのため、Forefoot Rockerが機能しないと、遊脚肢が接地のための下肢アライメントを作るための時間がなくなってしまうため、荷重応答が不安定なものとなってしまいます。
Forefoot Rockerと重心軌道の方向修正
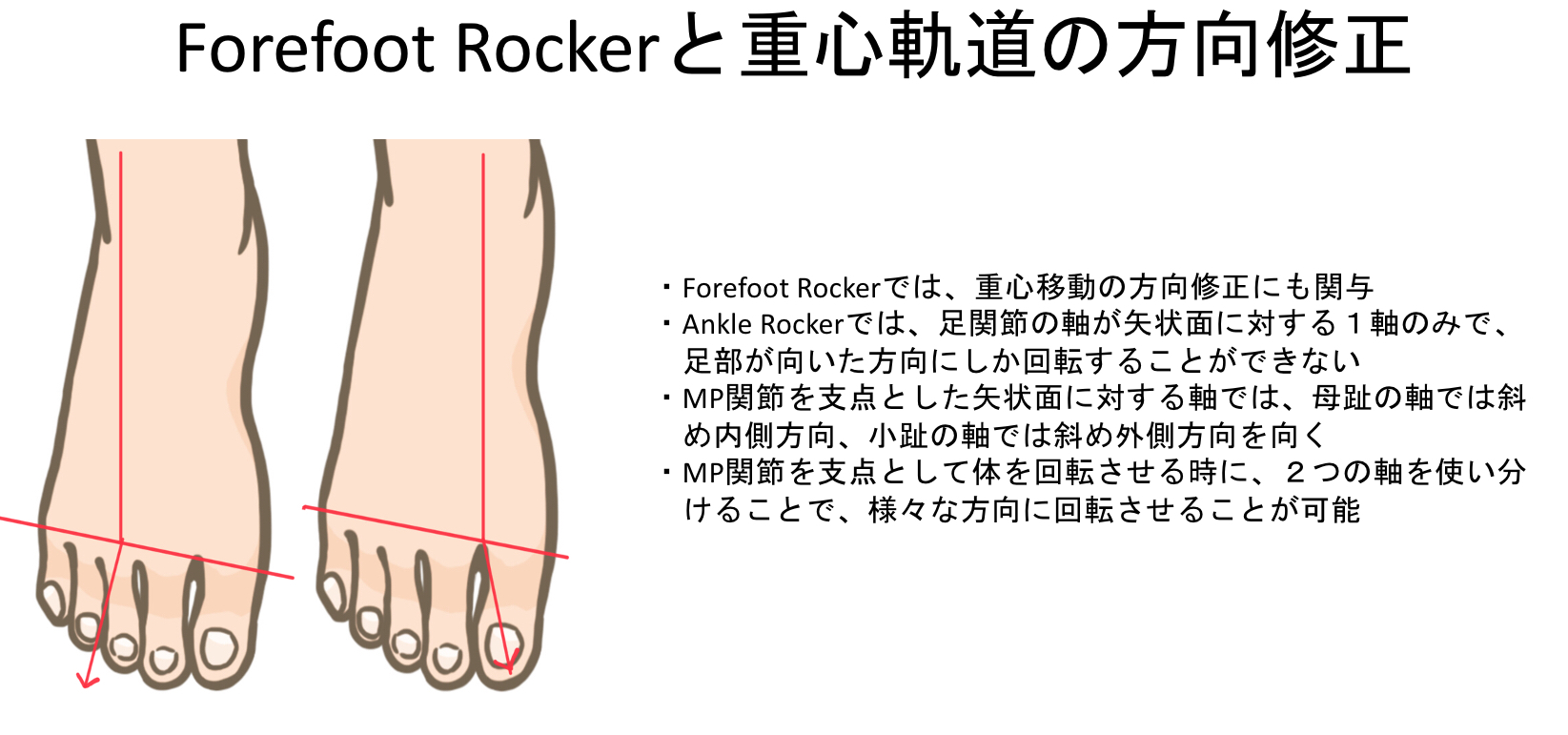
Forefoot Rockerでは、重心移動の方向修正にも関与しています。
Ankle Rockerでは、足関節の軸が矢状面に対する1軸のみで、足部が向いた方向にしか回転することができません。
一方、MP関節を支点とした矢状面に対する軸では、母趾の軸では斜め内側方向、小趾の軸では斜め外側方向を向いています。
MP関節を支点として体を回転させる時に、2つの軸を使い分けることで、体の様々な方向に回転させることが可能となります。
Forefoot Rockerと転倒問題
高齢者において、方向転換の際に転倒しやすいということはよく聞く話です。
方向転換の際のバランス保持にも、Forefoot Rockerが関与しています。
方向転換を行う際には、Forefoot Rockerにより方向を変換して重心軌道を斜め内・外側に回転させていく必要があります。
また、Ankle Rockerでは足部の向いている方向にしか回転できません。
このことから、方向転換の際に転倒しやすい理由として、身体が進もうとしている方向とRockerによる回転運動の方向の不一致によることが考えられます。
Forefoot Rockerの働きが十分であるからこそ、自由な体の回転でもバランスを崩さずに行く方向をコントロールできるのです。
Forefoot rockerと股関節運動の連動
Forefoot Rockerでは、股関節運動との協調的な連動がバランスのとれた歩行にとって重要となります。
股関節の内外旋の動きと連動した、足関節に関わる後脛骨筋や腓骨筋、腓腹筋の内・外側頭の活動が必要となります。
クロスステップを踏む場合、立脚側の股関節は内転・内旋・伸展の運動を起こします。
この運動と連動して、足関節は回外しながらMP関節の小趾側の回転軸を用いてForefoot Rockerを形成するように後脛骨筋や腓腹筋内側頭の活動を強めていきます。
遊脚側(外)へ下肢を踏み出していく(サイドステップ)場合、立脚側の股関節は外転・外旋・伸展の運動を起こします。
この運動と連動して、足関節は回内しながらMP関節の母趾側の回転軸を用いてForefoot Rockerを形成するように腓骨筋や腓腹筋外側頭の活動を強めていきます。
Forefoot Rockerと足部の安定
Forefoot Rockerの足部の安定には、横足根関節(ショパール関節)と足根中足関節(リスフラン関節)の強固な連結が必要になります。
距骨下での踵骨の回外により、距舟関節と踵立方関節の関節軸が交差し、足根間関節のロックが起こり、強固な状態に連結されます。
また踵離れの際、足底筋膜(踵骨から趾節骨まで伸びる)は内外側アーチと中足趾節関節を支えており、MP関節で受動的に伸展が起こるとウインチの原理により緊張します。
踵離れの後支持面は狭くなりますが、その中でも荷重が確実に支持できるように、MP関節を床に押し付ける能動的な筋活動を足底筋膜がサポートしています。
Forefoot Rockerの足部の安定に作用する筋群
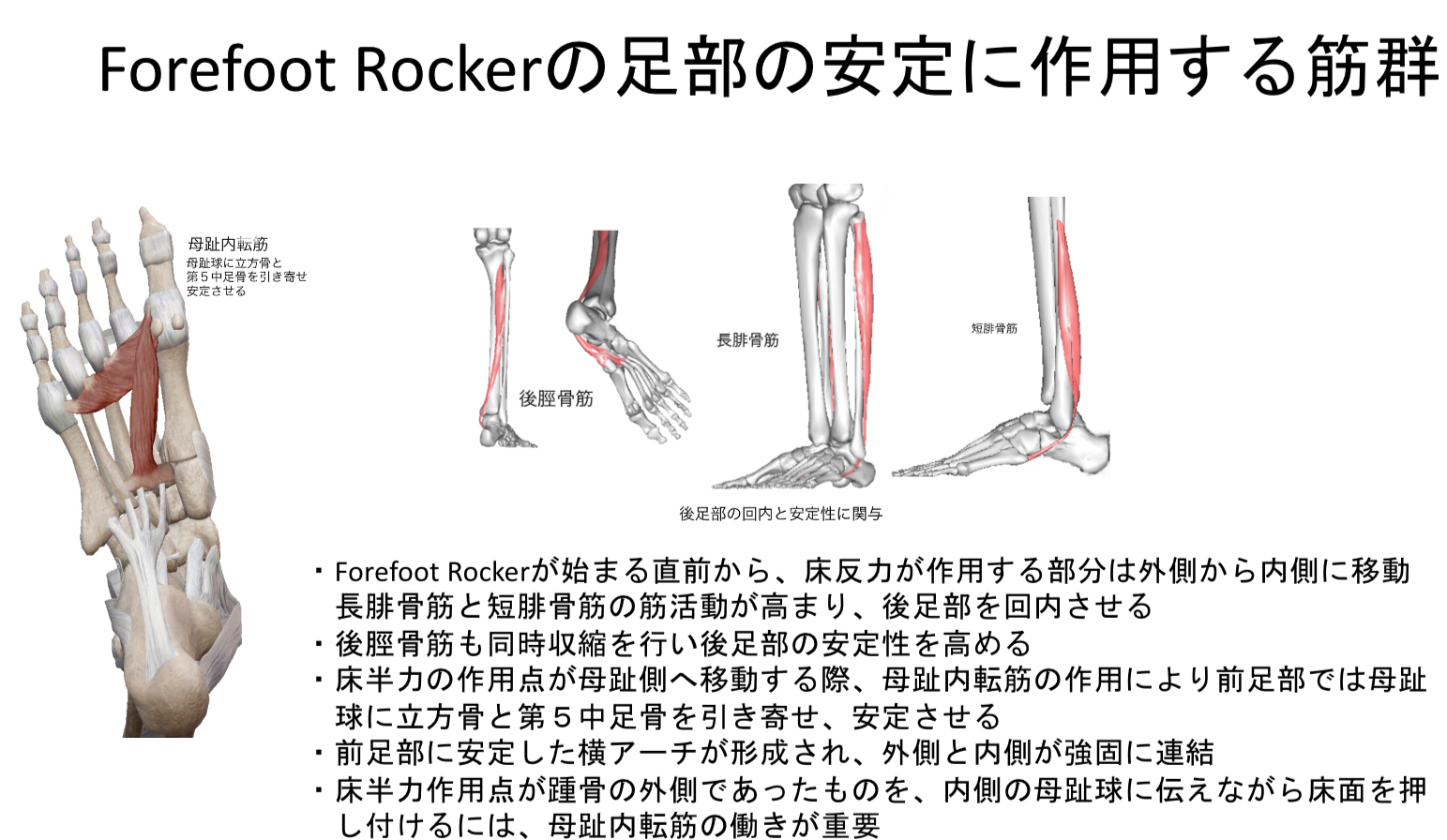
Forefoot Rockerが始まる直前から、床反力が作用する部分は外側から内側に移動していきます。
この際、長腓骨筋と短腓骨筋の筋活動が高まり、後足部を回内させるように働きます。
また後脛骨筋も同時収縮を行い後足部の安定性を高めています。
床半力の作用点が母趾側へ移動する際、母趾内転筋の作用により前足部では母趾球に立方骨と第5中足骨を引き寄せ、安定化に貢献します。
これにより前足部に安定した横アーチが形成され、外側と内側が強固に連結されます。
床半力作用点が踵骨の外側であったものを、内側の母趾球に伝えながら床面を押し付けるには、母趾内転筋の働きが重要となります。
スポンサードサーチ
歩行のバイオメカニクスに関すオススメ記事
子供の運動機能の発達!歩行獲得までの発達段階と順序について!脳卒中片麻痺の下肢(股関節)のリハビリ・自主トレ!歩行獲得に向けて!歩行の指標!評価バッテリーの概要と評価方法、結果の解釈脳卒中片麻痺者の歩行で体幹が非麻痺側へ側方傾斜する原因と対策脳卒中片麻痺の予後予測(急性期、上肢、歩行、失語)の方法!パーキンソン病の病態理解と脳科学!評価からリハビリテーション!バランス評価の概要と評価方法、結果の解釈、リハビリ方法!立ち上がり、着座動作とリハビリのコツ!神経基盤から筋活動、誘導方法まで!
呼吸療法認定士の資格を取りたい方は必見
呼吸療法認定士の資格勉強は隙間時間にするのがコツです。呼吸療法認定士 eラーニング講座
スキマ時間勉強ならリハノメ
PTOTSTのためのセミナー動画が見られます。各分野のスペシャリストが登壇しているので、最新の知見を学びながら臨床に即活かす事が可能です。
セミナーあるあるですが、、、メモ取りに夢中になり聞き逃してしまった。
なんてことはなくなります。何度でも見返す事が可能だからです。
高額なセミナー料+交通費、昼食代を支払うよりも、スキマ時間を見つけて勉強できる「リハノメ」を試してみるのも良いのではないかと思います。
臨床で差をつける人は皆隠れて努力していますよ。
長い期間で契約したほうが、月額が安くなります。
PT.OT.STのための総合オンラインセミナー『リハノメ』
PTOTSTが今より給料を上げる具体的方法
転職サイト利用のメリット
何らかの理由で転職をお考えの方に、管理人の経験を元に転職サイトの利用のメリットを説明します。転職活動をする上で、大変なこととして、、、
仕事をしながら転職活動(求人情報)を探すのは手間がかかる
この一点に集約されるのではないでしょうか?(他にもあるかもしれませんが)
管理人は転職サイトを利用して現在の職場に転職しました。
コーディネーターの方とは主に電話やLINEを通してのコミュニケーションを中心として自分の求める条件に合う求人情報を探してもらいました。
日々臨床業務をこなしながら、パソコンやスマホで求人情報を探すというのは手間ですし、疲れます。
そういう意味では、転職サイト利用のメリットは大きいと考えています。
転職サイト利用のデメリット
デメリットとしては、転職サイトを通して転職すると、転職先の病院や施設は紹介料(転職者の年収の20-30%)を支払うことです。これがなぜデメリットかというと、転職時の給与交渉において、給与を上げにくいということに繋がります。
それでも、病院や施設側が欲しいと思える人材である場合、給与交渉は行いやすくなるはずです。
そういった意味でも、紹介してもらった病院や施設のリハビリ科がどのような現状で、どのような人材が欲しいのかといった情報が、自分の持つ強みを活かせるかといった視点で転職活動を進めていくことが大切になります。
転職サイトは複数登録することも必要
転職サイトは複数登録しておくことが重要になるかもしれません。それは、転職サイトによって求人情報の数に違いが生じることがあるからです。
せっかく転職サイトを利用するのであれば、できるだけ数多くの求人情報の中から自分の条件にあった求人情報を探せる方が良いはずです。
その分複数のコーディネーターの方と話をする必要がありますが、自分のこれからのキャリアや人生を形作っていく上では必要なことになります。
また、コーディネーターの方も人間ですから、それぞれ特性があります。
自分に合う合わないと言うこともありますから、そういった意味でも複数サイトの登録は大切かもしれません。
とにかく行動(登録)!管理人も登録経験あり!転職サイトのご紹介!
ネット検索にある転職サイトの求人情報は表面上の情報です。最新のものもあれば古い情報もあり、非公開情報もあります。
各病院や施設は、全ての求人情報サイトに登録する訳ではないので、複数登録する事で より多くの求人情報に触れる事ができます。
管理人の経験上ですが、まずは興味本位で登録するのもありかなと思います。
行動力が足りない方も、話を聞いているうちに動く勇気と行動力が湧いてくることもあります。
転職理由は人それぞれですが、満足できる転職になるように願っています。
管理人の転職経験については以下の記事を参照してください。
「作業療法士になるには」「なった後のキャリア形成」、「働きがい、給与、転職、仕事の本音」まるわかり辞典
転職サイト一覧(求人情報(非公開情報を含む)を見るには各転職サイトに移動し、無料登録する必要があります)
①PT/OT/STの転職紹介なら【マイナビコメディカル】